

Los robots industriales son los robots que se crean y se utilizan en el sector industrial con el objetivo de automatizar un proceso, ya sea dentro de un ambiente colaborativo con humanos o dentro de un vallado de seguridad. A continuación vamos a profundizar en los diferentes tipos de robots industriales que existen, así como las marcas fabricantes, ejemplos y precios de los robots industriales.
Definición de qué un robot industrial y para qué sirven
El término robot industrial hace referencia a un manipulador mecánico multifuncional que se puede programar y se caracterizan por tener desde 3 hasta 7 ejes. Se utilizan con distintos objetivos y aplicaciones, como puede ser en caso de las cadenas de montaje y líneas de producción.
Son controlados de manera automática y reprogramables con varios grados de libertad. Es importante señalar, que para ejecutar los procesos industriales se emplea el campo de la robótica donde se define el diseño, estudio y el uso de estos robots industriales.
Características de los robots industriales y cómo se especifican
Estas máquinas autómatas se consideran multifuncionales y tienen la capacidad de movilizar piezas, materiales y objetos gracias a sus articulaciones o ejes. De esa manera las personas no tienen la necesidad de intervenir de forma constante para que las mismas funcionen. En la actualidad, el desarrollo de la tecnología robótica ha mejorado de manera eficaz las funciones de los robots lo que origina la implementación de los mismos en diversos campos.
Es importante destacar que los robots industriales tienen cierta similitud en cuanto a su apariencia, ya que esta se asemeja a la anatomía del humano, en especial en sus extremidades superiores. Incluso en las partes del robot estas características se mencionan, ya que cuentan con muñecas, codos, brazos, cintura, etc.
Las principales características de los robots industriales:
- Grado de libertad: se trata del estado de posición u orientación de cada robot, donde se requiere que cuente con coordenadas independientes. Sus ejes y eslabones que poseen movimientos de rotación y traslación tienen cierto grado de libertad con relación a sus otros ejes.
- Área de trabajo: es el espacio en el que se desempeñará el robot, allí se debe visualizar la distancia máxima en donde pueda trabajar con mayor efectividad.
- Capacidad de carga: se trata de la cantidad de peso expresado en kilogramos que el robot es capaz de movilizar, de igual manera se incluye el peso de la garra. En este punto los actuadores electrónicos convierten energía mecánica a partir de energía eléctrica, hidráulica o neumática. Sistemas de control, transmisión, reductores y accionamiento son los que hacen funcionar a los actuadores.
- Velocidad: la velocidad del robot se mide en ciclos minutos, pero con el robot cargado; los momentos de inercia en este caso también se toman en cuenta, ya que allí se presenta resistencia normal del cuerpo cuando existe rotación, y por ende existe cambio de velocidad. Los giros limitarán la velocidad cuando un robot se encuentre en movimiento y dependiendo del peso de la carga.
- Programabilidad: se trata de la capacidad que se les brinda a estos robots industriales para programarse en distintos lenguajes, con la finalidad de obtener un máximo beneficio en sus funciones.
Tipos de robots industriales
En la actualidad los robots industriales disponen de diferentes capacidades, tamaños, grados de autonomía y dimensiones en función de las aplicaciones que van a desarrollar.
- Robots manipuladores: son los más comunes en las industrias, gracias a que poseen un sistema de control básico y bajo coste. Las múltiples tareas que realiza son repetitivas y sencillas. Se subdividen en tres tipos, de secuencia fija, secuencia variables y forma manual.
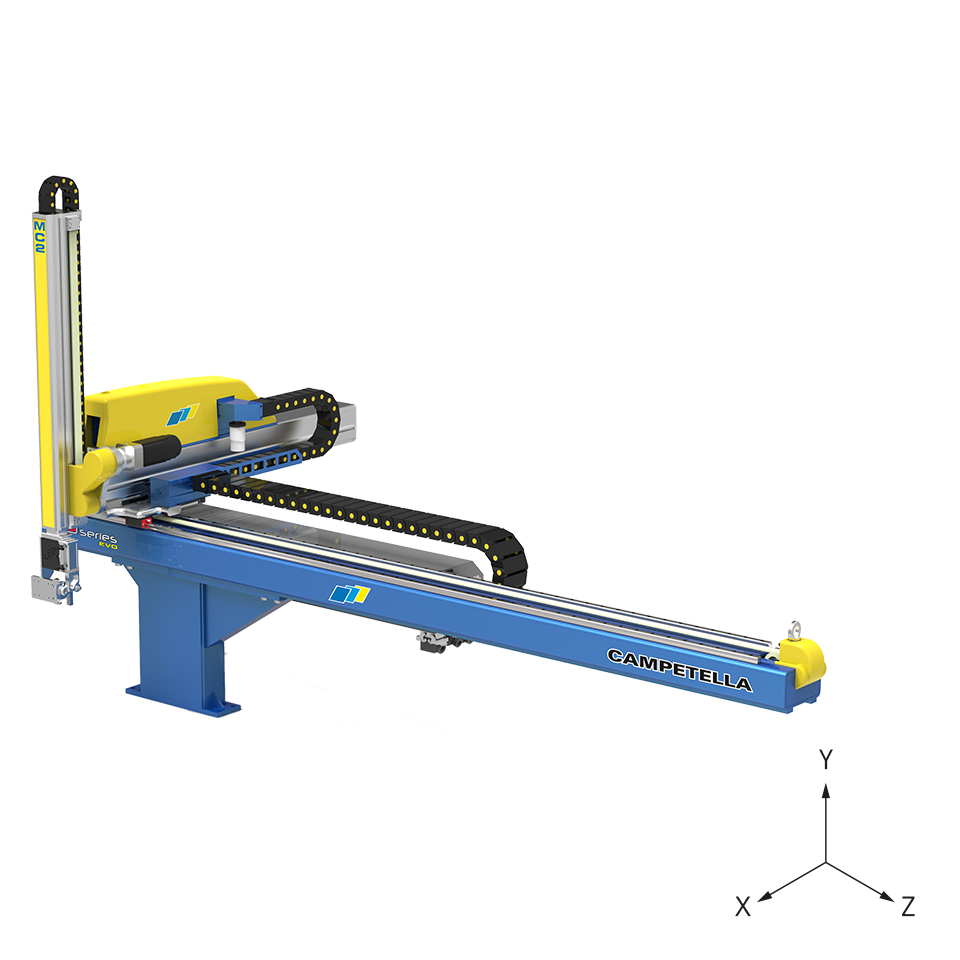
- Robots cartesianos: Se mueven en los ejes ortogonales cubriendo grandes distancias, muy aplicables en la industria plastica.
- Robots antropomórficos: Simulan el movimiento de un brazo humano, aplicables a diversas Industrias.
- Robots de repetición: Son los robots que tienen la función de realizar una tarea repetitiva o una secuencia de movimientos que son previamente programados por un humano. Estos robots industriales son los que la sociedad en general reconoce.
- Robots de computadores: estos robots son controlados y programados por una computadora u ordenador. En este caso el programador humano escribe el código en un programa específico del ordenador con la finalidad de que dé órdenes o secuencias de trabajo al robot. Son muchas las ventajas que brinda este tipo de robot, pero es necesario que expertos cualificados los operen adecuadamente.
- Robots inteligentes: este tipo de robot tiende a relacionarse con su entorno gracias a sensores y aplicaciones. Adicionalmente estos robots se mueven y realizan tareas de manera autónoma.
- Microrobots: Los microrobots se encuentran en fase de investigación y desarrollo. El objetivo de este tipo de robot son para aplicaciones de entretenimiento, educacionales, medicina o de investigación.
Otros tipos de robots industriales son los siguientes:
- Cilíndricos: poseen una columna vertical que gira sobre su base. Las industrias suelen utilizarlos para ensamblaje, manipular herramientas, hacer soldaduras por punto y manipulación en máquinas de fundición a presión.
- Scara: con cuatro grados de libertad, estos robots se caracterizan por tener un rápido ciclo de trabajo, un amplio campo de aplicación en diversas tareas y una excelente repetitividad.
- Polar: con varias articulaciones, en donde dos son rotacionales y una es lineal y tienen la capacidad de desplazar el brazo en un área esférica, gracias a sus articulaciones.
- Angulares: posee articulaciones que dan movimiento al robot tanto rotacional como angular, logrando que el brazo efectúe movimientos de interpolación lineal
- Paralelos: este tipo de robot cuenta con cadenas cinemáticas cerradas, en donde varias cadenas cinemáticas seriales independientes hacen que la plataforma móvil y la base se conecten, estas se clasifican según el grado de libertad.

Fuente: Revista de robots